Chess Robot
A physical chess-playing robot that plays over the board against a human opponent. Built as a BSc thesis at KTH — combines a custom SCARA arm, computer vision, inverse kinematics, and the Stockfish engine running on a Raspberry Pi.
A robot that plays physical chess — moving real pieces on a real board — built from scratch as a BSc thesis project at KTH with a classmate. The robot can play against a human or run Stockfish vs. Stockfish autonomously.
How it works
Every move goes through a full pipeline:
- Camera capture — a Raspberry Pi Camera Module V2 mounted above the board takes an image after each turn.
- Vision pipeline — OpenCV detects the board’s inner corners, extrapolates to outer corners, and applies a perspective warp to correct for the camera angle. Each square is then sampled at its centre pixel and classified by RGB values to determine occupancy and piece colour.
- FEN generation — the board state is encoded into Forsyth-Edwards Notation and handed to the Stockfish engine.
- Move selection — Stockfish evaluates all legal moves, scores each one, and returns the best. The code handles mate-in-N detection, pawn promotion, and captures.
- Inverse kinematics — the target square’s XY coordinates are converted into joint angles (α and β) for the two-link SCARA arm using the standard IK equations.
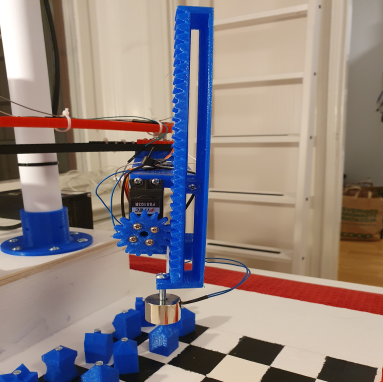
- Motor control — stepper motor step counts are calculated from the joint angles and driven via GPIO. The Z-axis is a servo-driven rack-and-pinion. An electromagnet (toggled through an NPN transistor) picks up and drops pieces, which have steel screws embedded in their bases.
Hardware
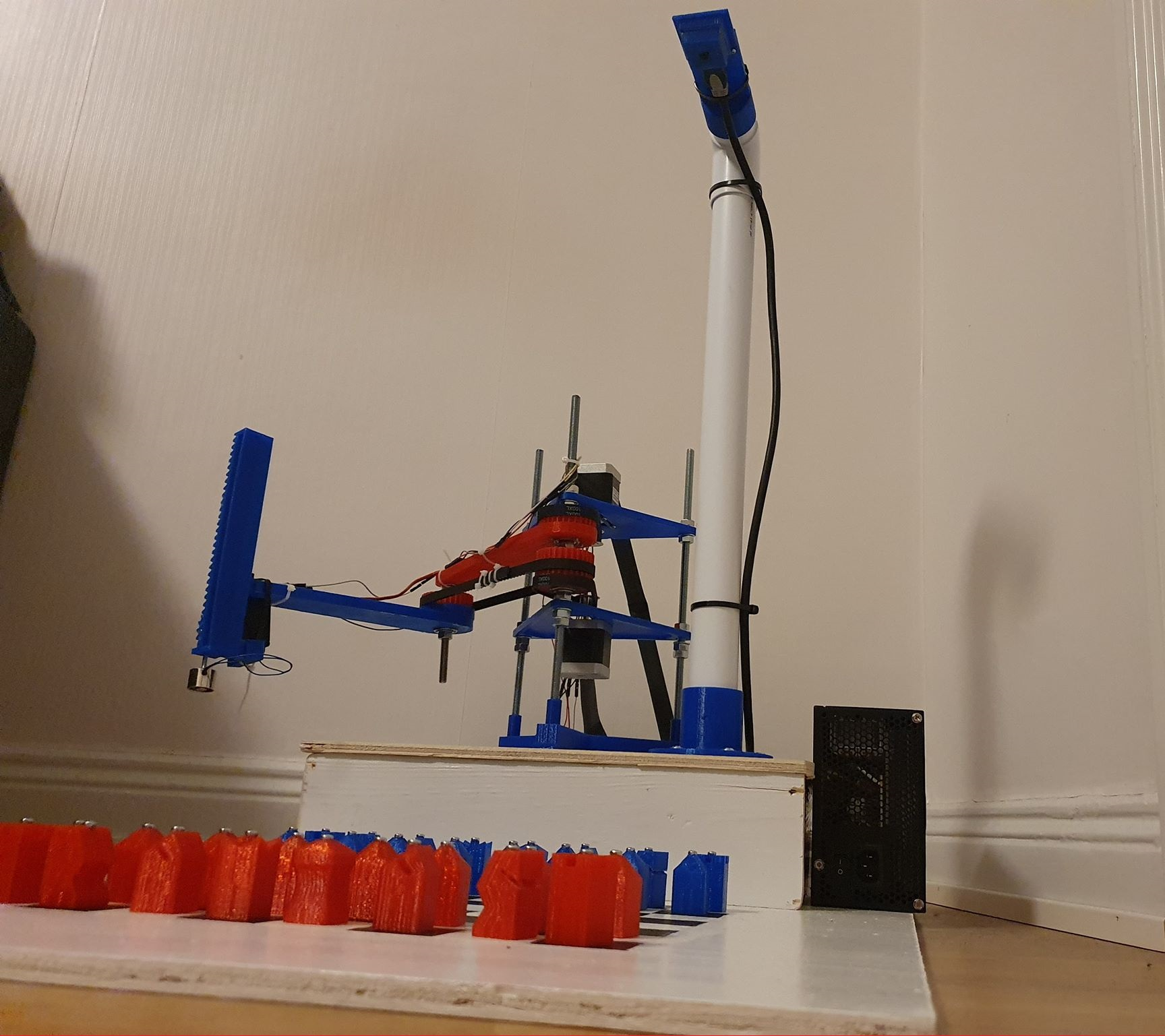
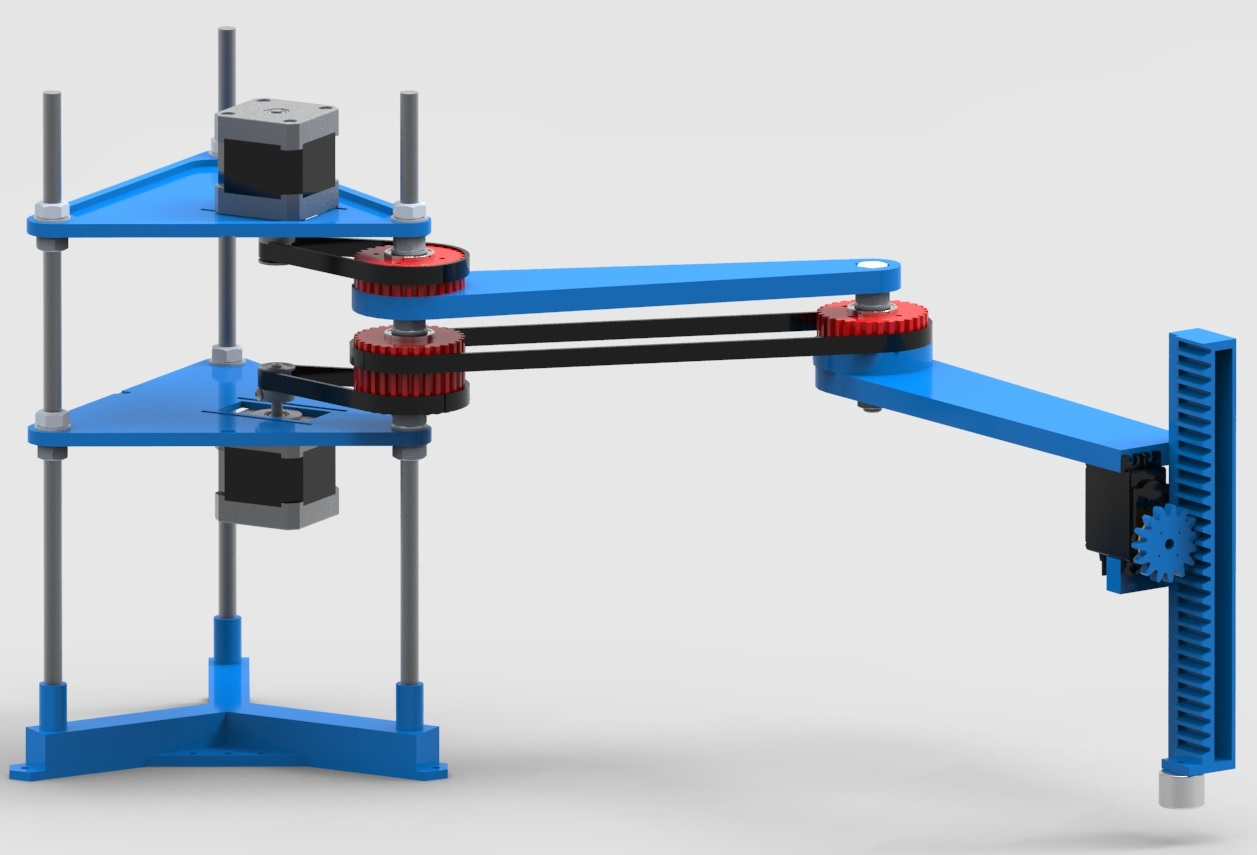
The arm is a SCARA (Selective Compliance Articulated Robot Arm) designed in Solid Edge and 3D-printed on an ANET A8. Two NEMA 17 stepper motors drive the XY plane via timing belts; a continuous servo drives the vertical gear rack. Everything runs off a Raspberry Pi 4 with an external 400W PSU for the motors and electromagnet.
Chess pieces were custom 3D-printed in high-contrast colours (red and blue) and made uniform in height to keep the vision pipeline simple.
Results
Arm positioning achieved 100% accuracy in isolated Z and XY tests. Full-game reliability improved significantly when motor speed was reduced — at the lower setting, 8 out of 10 games completed without failure, averaging 12 moves before any issue at the higher speed.
Visual recognition worked reliably down to ~15 lux (roughly a lit city street at night), where red pieces remained detectable but dark-blue pieces became hard to distinguish from black squares — a known limitation of pure RGB detection without machine learning.
What I’d do differently
- Adaptive motor speed (slow for short moves where shaking is worst, fast for long ones)
- Stiffer arm material to eliminate the flex that caused occasional Z-axis inconsistencies
- ML-based piece recognition to handle pawn promotion and lower-light conditions
- A physical button or automatic image diff to detect the human’s move, removing the need for SSH input
Demo
Screenshots